피지컬 AI 기업 리얼월드(RLWRLD)가 로봇 손(Dexterous Robot Hand)의 실제 성능과 설계 특성을 비교·분석할 수 있는 오픈 플랫폼 ‘올핸즈업(All Hands Up!)’을 공개했다.
리얼월드는 자체 로보틱스 파운데이션 모델(RFM) ‘RLDX-1’ 개발 과정에서 축적한 로봇 손 운용 경험을 바탕으로, 로봇 손 설계의 한계와 트레이드오프를 분석한 기술 리포트와 시각화 기능을 제공하는 플랫폼을 선보였다.
현재 로봇 손은 피지컬 AI 구현의 핵심 부품으로 평가받고 있지만, 크기와 악력, 역구동성(Back-drivability) 사이의 구조적 제약으로 인해 모든 성능을 동시에 만족시키는 제품은 아직 존재하지 않는다.
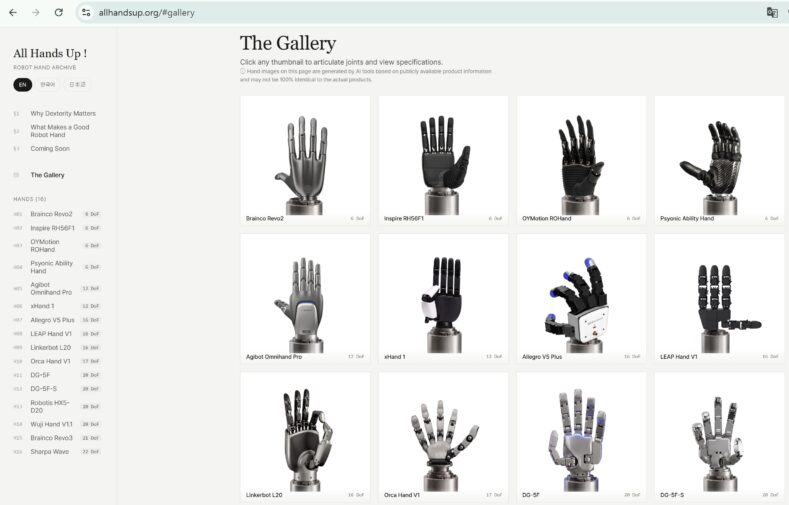
리얼월드(RLWRLD), 로봇 손 분석 플랫폼 ‘All Hands Up!’ 공개 (자료 제공: 리얼월드)
스펙보다 중요한 것은 실제 작업 성능
리얼월드는 제조사가 제공하는 단순 스펙보다 실제 현장 성능이 중요하다는 판단 아래 로봇 손의 핵심 설계 요소를 정량적으로 비교했다.
플랫폼에서는 엄지손가락 가동 범위(Kapandji Scale), 손가락 말단 관절의 독립 구동 여부, 최소 파지 직경, 외장 소재의 마찰 특성 등 실제 작업 수행에 영향을 미치는 요소들을 확인할 수 있다. 또한 자체 벤치마크 시스템인 ‘DexBench’를 활용해 18종의 실제 조작 태스크를 기준으로 각 제품의 장단점을 분석했다.
리얼월드는 현재 로봇 손 개발 현실을 고려해 산업 현장 적용용(Type 1)과 데이터 수집·학습용(Type 2)으로 역할을 분리하는 전략도 제시했다. 산업 현장용은 내구성과 경량성에 집중하고, 학습용은 높은 역구동성과 정밀성을 확보하는 방식이다.
플랫폼의 또 다른 특징은 URDF 기반 인터랙티브 시뮬레이션 기능이다. 사용자는 별도 프로그램 없이 웹 브라우저에서 마우스 조작만으로 각 로봇 손의 관절을 움직여 볼 수 있으며, 실제 물체를 잡는 파지 형태와 관절 구동 방식을 사전에 검증할 수 있다.
제품별 주요 사양 비교는 물론 실제 로봇 개발과 시뮬레이션에 활용 가능한 URDF 데이터도 함께 제공된다. 현재 10종 이상의 다관절 로봇 손 데이터가 등록돼 있으며 지속적으로 확대될 예정이다.
리얼월드는 향후 분기별 업데이트를 통해 최신 로봇 손 데이터를 추가하고 산업계와 연구계가 활용할 수 있는 공통 기준을 구축한다는 계획이다.
류중희 리얼월드 대표는 “올핸즈업은 단순 제품 비교 사이트가 아니라 실제 로봇 손 운용 데이터를 산업 전반과 공유하는 오픈 플랫폼”이라며 “제조사는 설계를 검증하고 연구자와 산업 파트너는 도입 기준을 수립할 수 있는 공통 언어를 제공하겠다”고 말했다.
The post “좋은 로봇 손은 무엇인가”…리얼월드, 로봇 손 성능 비교 플랫폼 공개 appeared first on 벤처스퀘어.